[ERROR] Unused block "visual" when instantiating macro: link (/home/adbidwai/nus_ws/src/hebi_description/urdf/./link.xacro) in file: daisy.xacro #20
Description
Hello developers,
My system configuration details are as follows:
OS : Ubuntu 18.04.1
ROS Distro : ROS Melodic
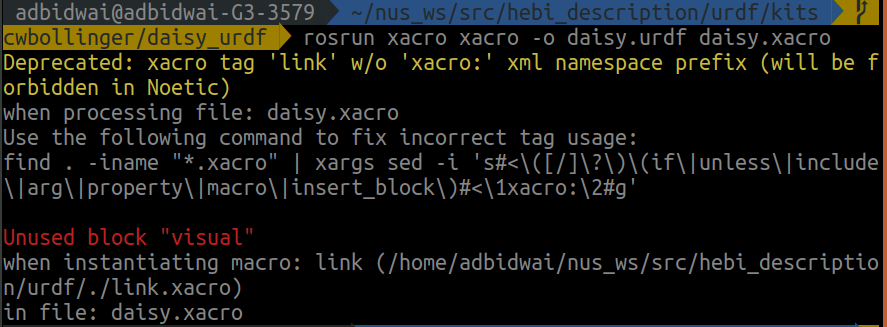
I need the URDFs of the Daisy hexapod robot platform to perform some simulations In Gazebo. When I try to generate a URDF from the xacro files of the daisy robot using the xacro ROS package, I encounter the following error,
adbidwai@adbidwai-G3-3579 ~/nus_ws/src/hebi_description/urdf/kits cwbollinger/daisy_urdf rosrun xacro xacro -o daisy.urdf daisy.xacro
Deprecated: xacro tag 'link' w/o 'xacro:' xml namespace prefix (will be forbidden in Noetic)
when processing file: daisy.xacro
Use the following command to fix incorrect tag usage:
find . -iname "*.xacro" | xargs sed -i 's#<\([/]\?\)\(if\|unless\|include\|arg\|property\|macro\|insert_block\)#<\1xacro:\2#g'
Unused block "visual"
when instantiating macro: link (/home/adbidwai/nus_ws/src/hebi_description/urdf/./link.xacro)
in file: daisy.xacro
Please let me know of any more details are required.