-
What is this project about
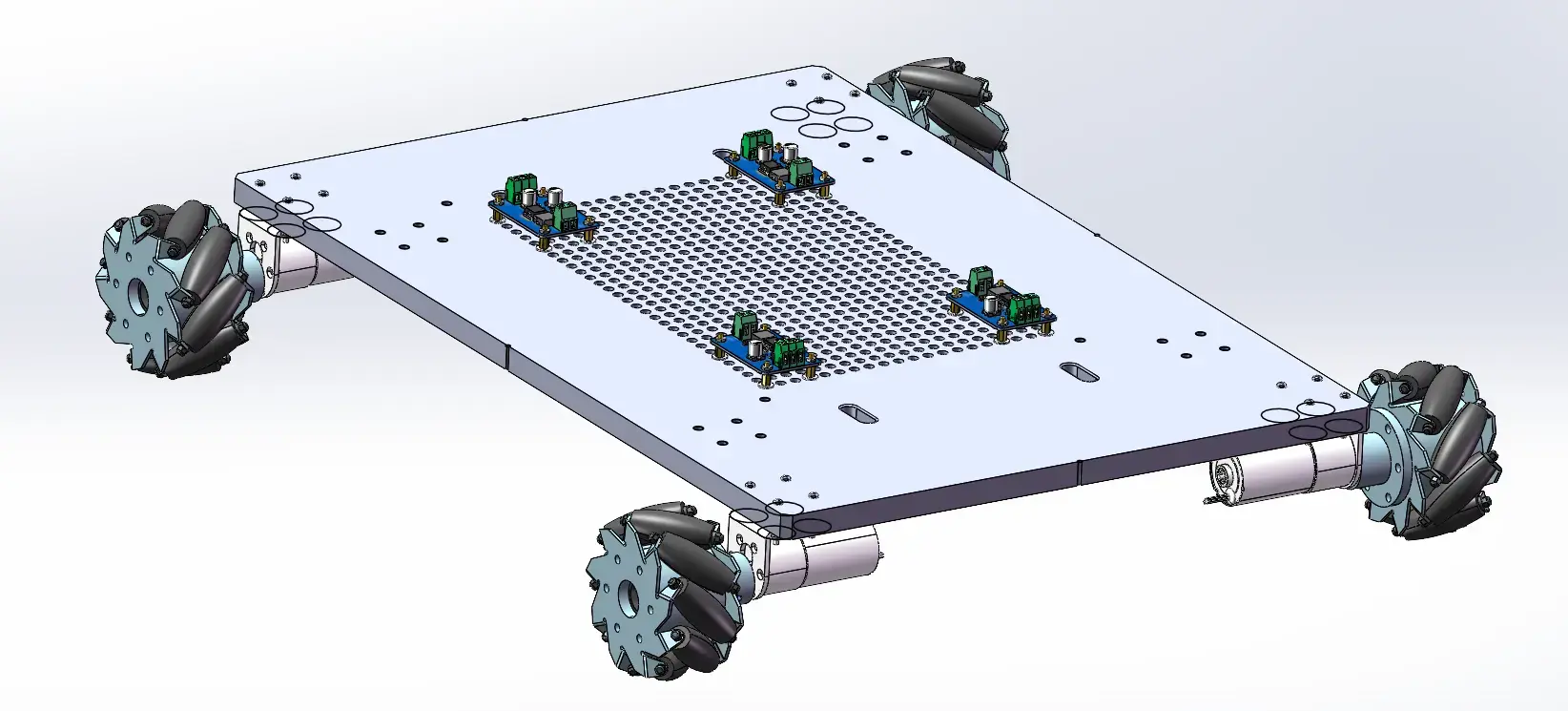
She is a robot named BigZ. From a physical instance, she is a robot that looks like a car, but more than that,she is a platform for implementing and validating electronic related technologies.
-
Why is this project created
Like I said, she is a platform that reflects what I have learned. I want to implement different technologies to make BigZ become more clever from "just a car".
- Software
- SOLIDWORKS 2024 for mechanical structure
- jlc EDA(EasyEDA) for PCB design
- Keil uVision 5 + STM32CubeMX for coding lowest level driver
- vscode + ESP-IDF for coding addtional level driver
- Hardware
- STM32F407 as lowest level
- ESP32-WROOM-32 as additional level
├── Code // Source code here spans from hardware drivers to simple intelligence modules.
├── DevFrame // A framework defining and guiding the development of robotic hardware and software.
├── MechanicalStructure // This folder contains simple SolidWorks 3D models of all robotic components.
├── PCBdesign // This directory contains all device PCB design and fabrication files, designed in jlcEDA.
├── ReferenceManual // Various reference manuals required during the development process.
└── RevisionLog // Summarize the correction of errors, update a certain section, or add any new features.
This project is under MIT License.